CH0X0 IMU AHRS ROS 陀螺仪 加速度计 6轴姿态传感器 倾角模块
-
登录 后询价或查看价格
-
CH040系列
-
HIPNUC 超核电子
-
请咨询供应商
-
HIPNUC 超核电子
产品介绍
 CH0X0系列是利用高性能、小体积、工业级MEMS惯性器件感知物体姿态信息的姿态感知系统,它集成了
CH0X0系列是利用高性能、小体积、工业级MEMS惯性器件感知物体姿态信息的姿态感知系统,它集成了
惯性测量单元(IMU)、磁力计、气压计和一款搭载扩展卡尔曼融合算法(EKF)的微控制器。可输出经过传感器
融合算法计算得到的基于当地地理坐标的三维方位数据,包含有绝对参考的航向角,俯仰角和横滚角。同时也
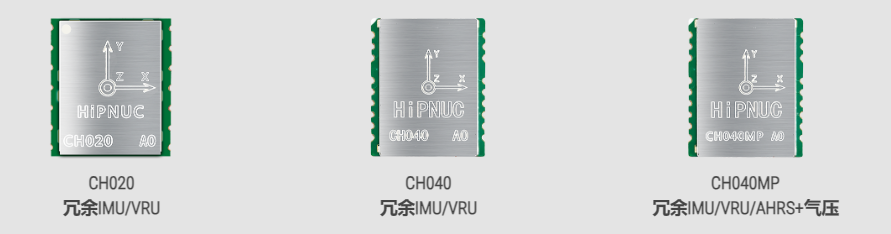
可以输出校准过的原始的传感器数据。CH0X0系列的封装可以方便可靠地集成到用户的系统,CH0X0系列主要
包含CH020、CH040、CH040MP三款产品。
主要应用场景:
CH0X0系列可以精确地感知移动设备的俯仰(Pitch)、横滚(Roll)、航向(Yaw)等姿态信息,比如
AR/VR,自动导引小车(AGV),巡检机器人、无人机等应用领域。它可与激光雷达(Lidar)、视觉
(Camera)等导航方案形成优势互补,增强设备的导航精度,并减小对外界参考物体的依赖。
典型的应用市场如下:
自动导引小车(AGV/AMR)
服务机器人
巡检机器人
工程机械
主要优势
完整的制造体系
自主研发自动化批量标定与测试产线,保证量产产品一致性。
小体积,嵌入式设计,产品兼容性好性价比高
零偏、比例因子、跨轴等误差因素出厂标定
先进的软件算法
丰富的行业经验,融合先进的算法,可以在静止检测、慢速检测、快速启动,实时估算零偏、地磁自动校
准、抗磁场干扰等方面具有优势表现。
工业级MEMS传感器
高达2.5°/h的零偏稳定性
高达0.3°姿态角精度
开发套件
评估套件
拥有丰富接口和测试电路的评估套件,详情可参考CH0X0_EVK用户手册
完善的上位机软件
CHCenter是我们为了用户快速评估产品而开发的一款PC端软件,可以自由的运行在WIN/Linux之上。
CHCenter具有如下特点:
数据显示
数据记录
数据分析
产品参数配置
固件升级
产品替代
资料下载
| 文件名称 | 大小 | 操作 |
|---|---|---|
| CH0X0_um_cn | 3.58 MB | 下载 |
IMU ROS 陀螺仪 加速度计 姿态传感器 倾角模块 惯性导航同类产品
加载中···
