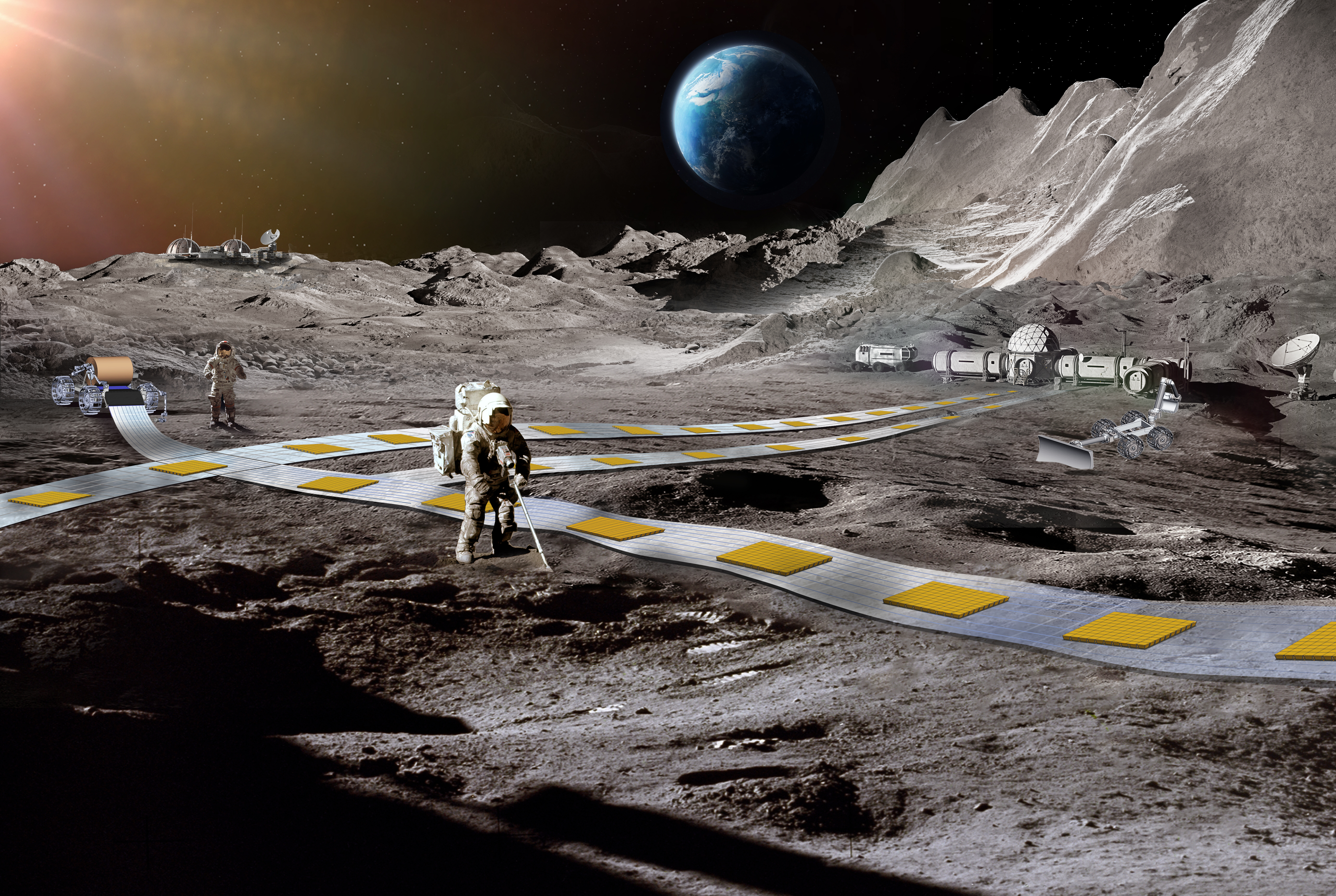
NASA(美国国家航空航天局)正在研究建立第一个月球铁路系统,称为柔性悬浮轨道(Flexible Levitation on a Track,FLOAT)旨在为月球提供可靠、独立、高效的载荷运输方式。
该铁路系统预计将在20世纪30年代初支持可持续月球基地的日常运行。目前,该项目仍处于概念阶段,NASA将继续开发关键技术,解决未来两年的预算问题。
FLOAT系统使用在三层柔性薄膜轨道上悬浮的无动力磁悬浮机器人。该轨道由石墨层、柔性电路层和可选的薄膜太阳能板层组成。石墨层使机器人能够通过反磁悬浮在轨道上被动漂浮。柔性电路层产生电磁推力,可控推动机器人沿轨道移动,薄膜太阳能板层在阳光下为底座提供电力。
与传统的月球机器人不同,FLOAT机器人没有活动部件,并悬挂在轨道上,以减少月球灰尘的磨损。FLOAT轨道直接铺设在月球表面,避免了大规模的现场施工。
单个FLOAT机器人可以以0.5米/秒以上的速度运输不同形状和尺寸的有效载荷,重量可以超过30kg/m3。大型FLOAT系统每天可移动多达10万kg的月壤或有效载荷数km。
FLOAT将在尘土飞扬、不适合居住的月球环境中独立运行,只需至少现场准备。随着时间的推移,其轨道网络可以重新配置,以满足月球基地不断发展的任务需求。获取更多有价值的信息 访问:https://byteclicks.com
FLOAT系统是一种创新高效的月球运输系统,将为月球的探索和建设提供强有力的支持。虽然它仍处于概念阶段,但它的前景令人期待。
版权声明:除特别说明外,本网站所有文章均为 字节点击 采用原创内容 BY-NC-SA 知识共享协议。原文链接:https://byteclicks.com/59427.html 请以链接的形式注明本文的地址。转载本网站的内容不得用于任何商业目的。本网站转载的内容版权归原作者所有,文章内容仅代表作者的独立观点,不代表字节点击位置。报告中所有的商标、图像版权、专利和其他版权信息属于其合法持有人,仅用于传递信息和非商业用途。如有侵权行为,请联系 gavin@byteclicks.com。我们将协调处理。