产品介绍
SHT-3-01-F光纤陀螺寻北仪
1 产品用途及使用范围
SHT-3-01-F陀螺寻北仪(以下简称产品)主要用于快速自主确定真北方向。
本文件适用于产品的安装、使用及维护。
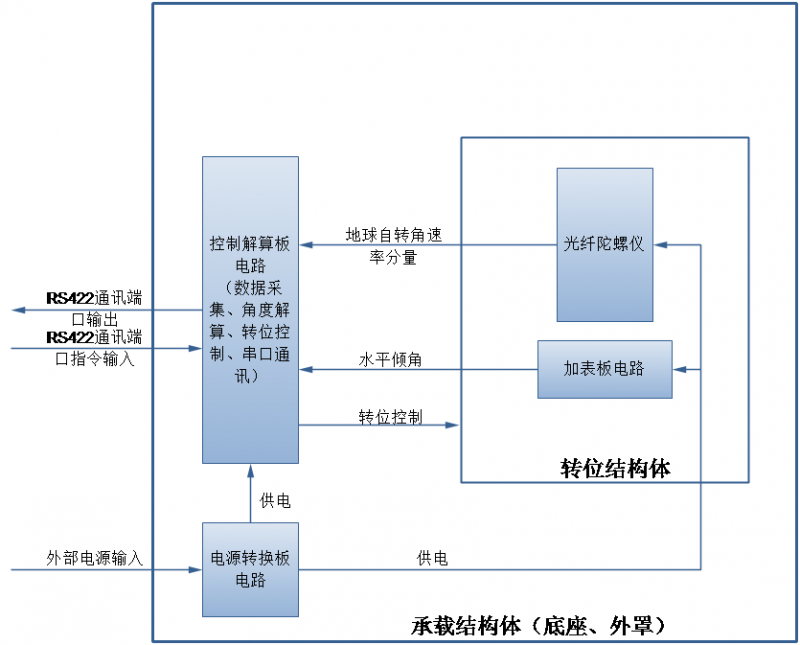
2 产品的组成和工作原理
产品主要由光纤陀螺仪、加速度计电路、转位结构体控制电路和处理器解算电路、电源转换电路构成。
产品基于Sagnac效应,以激光为光源,用光纤构成环形光路来测量正反两束光随光纤环转动而引起的光程差,从而获得敏感轴的角增量信息,测量地球自转角速度。工作时通过转位结构体实现对三个不同位置的地球自转角速率分量进行测量,并根据测量的地球自转角速率分量解算产品的方位信息。同时通过两轴向的加速度计,得到产品轴向的倾角数据,可对载体平台进行调校及寻北仪倾斜校正。产品的原理结构见图1:
3 主要技术指标
3.1 供电电源
a)供电电压:9-36Vdc;
b)峰值功耗≤12W。
3.2 主要技术指标
3.2.1 工作方式:静态。
3.2.2 准备工作时间:≤30s。
3.2.3 寻北时间:≤3min。
3.2.4 横倾角、纵倾角测量范围:-15º~+15º。
3.2.5 倾角精度:≤0.02º(1σ)。
3.2.6 寻北精度:≤0.1º(1σ)。
3.2.7 方位角测量范围:0º-360º
3.2.8 工作纬度(设计保证):南纬65º~北纬65º。
3.2.9 海拔高度>4500米。
3.2.10 数字输出形式:RS-422。可选RS-232,RS-485
3.2.11 重量:≤4.5Kg
3.2.12 通讯协议
数字通讯采用差分RS-422异步串行全双工通讯方式。
串行通讯以一个字节为基本传输单位,波特率为38400bps,一个字节传输有效位共10位:1bit起始位(逻辑0),8bit数据位,无奇偶校验,1bit停止位(逻辑1)。8位数据中总是低位在前,高位在后;对于一个多字节数,总是先传低位字节,后传高位字节。
表3 输出数据帧格式(共10个字节)
字节序号 | 信号名称 | 量程 | 有效位 | 定义 | 备注 | |
0 | Char1 | 8 | 帧头 | 十六进制数AA | ||
1 | Char2 | 8 | 帧头 | 十六进制数55 | ||
2 | State | 8 | 状态字 | 0x00 | 正在启动寻北仪 | |
0x01 | 启动正常,可进行寻北 | |||||
0x02 | 正在寻北 | |||||
0x03 | 寻北完成,可再次寻北 | |||||
0x11 | 启动异常 | |||||
3、4 | Roll | -15°~15° | 16 | 横倾角 | 补码,第3字节为低字节,1LSB=0.01° | |
5、6 | Pitch | -15°~15° | 16 | 纵倾角 | 补码,第5字节为低字节,1LSB=0.01° | |
7、8 | Azimuth | 0°~360° | 16 | 方位角 | 无符号数,第7字节为低字节,1LSB=0.01° | |
9 | Sum | 8 | 校验和 | 校验和是从2字节到8字节所有字节代数和取低8位。 | ||
表4 输入命令帧格式(共4个字节)
字节序号 | 信号名称 | 有效位 | 备注 |
0 | Char1 | 8 | 十六进制数24 |
1 | Char2 | 8 | 十六进制数4E |
2 | Char3 | 8 | 十六进制数46 |
3 | Char4 | 8 | 十六进制数2A |
3.3 环境条件
3.3.1 温度工作范围:-40℃~+70℃。
3.3.2 温度贮存范围:-55℃~+70℃
3.3.3 冲击
10g,11ms,半正弦波,方向:安装方向,次数:3次。
3.3.4 振动
5Hz~5.5Hz,25.4mm;5.5Hz~200Hz,1.5g(rms);方向:安装向;时间:15min;循环次数:3次。
3.3.5 湿热
在温度为30℃、60℃,相对湿度(95±3)%条件下,应正常工作,金属表面无锈蚀,防护涂层无起泡、起皱、开裂或脱落。
3.3.6 淋雨
淋雨强度:13cm/h、淋雨时间:1h、淋雨角度:四侧面和顶面、喷孔直径:1mm~2mm。
产品替代
资料下载
| 文件名称 | 大小 | 操作 |
|---|---|---|
| 2021061857870149 | 320.44 KB | 下载 |
声明:本产品内容及配图源自互联网收集或平台用户自行上传,目的在于传递更多信息,并不代表本网赞同其观点或证实其内容真实性,不承担此类作品侵权行为的直接责任及连带责任。如涉及作品内容、版权等问题,请联系本网处理,侵权内容将在一周内下架整改。
